A Synchronous Machine is named Synchronous because the speed of Rotor is equal to the speed of rotating field. The speed of rotating field is determined by the supply frequency and the number of poles in the machine and knows as Synchronous speed. Any deviating in the speed of rotor from synchronous speed will lead to synchronizing force which in turn will try to maintain the speed of rotor to synchronous speed.
As the word Hunting signifies, hunting is basically the swing in the speed of rotor when a sudden change in load is carried out. Mark the word, sudden change. If the load is changed gradually then hunting phenomenon will not be observed.
For understanding the phenomenon of hunting, assume a Synchronous Motor operating at no load and if we assume the system to be lossless then the load angle will be zero at no load condition.
Now suppose load P1 is gradually applied to the shaft of the motor. Therefore the load angle δ will gradually increase from zero to δ1 so that
Output power of Motor = Load Power Requirement
Hence, (EfVtSinδ1)/Xs = P1
and the motor will operate satisfactorily.
So we see that in case of application of gradual load, the system works fine. So what exactly happens when we apply sudden load to the Synchronous Machine so that hunting comes in picture?
Now suppose when the Synchronous Motor was operating at no load condition, a sudden load P1is applied. As a sudden load is applied, the speed of rotor shaft will momentarily decrease to meet the load demand and therefore the load angle will increase from zero to δ1 where power output of Motor is equal to the load demand. So the Motor will operate satisfactorily?
No, the Synchronous Motor won’t operate at equilibrium in this condition. Even though the output power of Synchronous Motor is equal to the load demand but the speed of rotor is less than the synchronous speed and hence the motor will try to reach to its synchronous speed. How can Motor do achieve synchronous speed? Synchronous Motor has no any other option to reach to its synchronous speed other than by increasing the load angle. Also, one can guess this as the speed of rotor is less than the synchronous speed hence it will lag more behind the rotating magnetic field which cause increase in angle between the excitation emf and terminal voltage will i.e. load angle. Therefore the load angle will continue to increase till the rotor speed becomes equal to synchronous speed. Let’s assume at load angle of δ2= 2δ1 the rotor attains synchronous speed.

So rotor attained the synchronous speed hence the Motor will operate at equilibrium condition?
No it won’t. Hehehe…….
Because at load angle of δ2, the power output P = EfVtSinδ2/Xsis more than the power demand P1 of the load which will cause Motor to accelerate above the synchronous speed. As now, the speed is more than the synchronous speed the load angle will decrease (How am I saying this?Just think like you are sitting on a Train and another train is moving parallel to you in the same direction and if the speed of your train now more than the other train then the gap between the two trains will decrease. Likewise the load angle will decrease here as the speed of rotor is more than synchronous speed.).
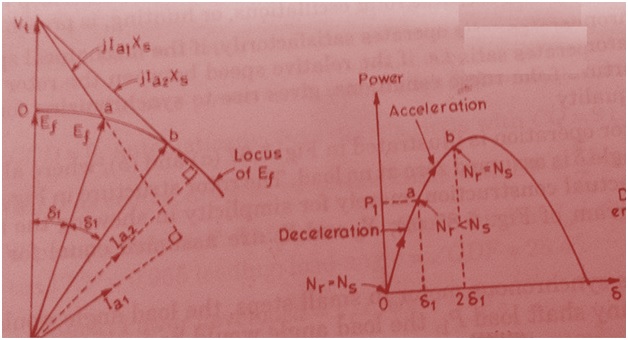
In the figure above, this situation correspond to point ‘b’. Now, the power output will start to come down to point ‘a’ where the power output is equal to the load demand P1 but at this point ‘a’ the speed to rotor is more than the synchronous speed hence the load angle will continue to come down to zero as we have assumed lossless system. Note that below point ‘a’ the Motor will decelerate as Pout <P1 but above point ‘a’ the rotor will accelerate as Pout >P1.
Thus we reached at the same place where from we started i.e. at load angle zero. Therefore the things will repeat again and again.
As can be seen from the figure above that the rotor swings back and forth about δ1. This is the equilibrium position about which the rotor rotates.
Here δ1 = Sin-1(P1/Pm)
Where P1 = Load demand power
Pm = Peak Power output
This phenomenon of oscillation of rotor shaft about its final equilibrium position δ1 is called HUNTING.
Please have a look at the phasor diagram shown above. It is clear that corresponding to point ‘a’ the armature / load current is Ia1 and corresponding to point ‘b’ it is Ia2. Thus HUNTING is not only associated with oscillation in Rotor but it is also associated with oscillation in Power and Current.
For damping the HUNTING, damper winding is used so that system can operate satisfactorily at equilibrium position.
Hope it will make you clear everything about HUNTING. Please ask if in doubt. Thank you!
Thank you sir
Thank you sir, it was clarifying. Hope it comes useful for my arrear paper in synchronous and induction machine subject!